پروژه اثرات بیومکانیکی هندسه دیسک مصنوعی توپی شکل بر ستون فقرات
معرفی پروژه عنوان این پروژه اثرات بیومکانیکی هندسه دیسک مصنوعی توپی و سوکت بر ستون فقرات کمر می باشد. در این مطالعه یک مدل اجزای محدود سه بعدی از ستون…
0 دیدگاه
مارس 15, 2022

معرفی پروژه عنوان این پروژه اثرات بیومکانیکی هندسه دیسک مصنوعی توپی و سوکت بر ستون فقرات کمر می باشد. در این مطالعه یک مدل اجزای محدود سه بعدی از ستون…

صدمات استخوانی
استخوان عنصر ساختمانی اصلی بدن است. حفظ اندامهای داخلی بدن و تسهیل حرکت اندامها از وظایف اصلی استخوان میباشد. از خصوصیات عمدة آن میتوان منحصر به فرد بودن آن را از نظر قابلیت خود ترمیمی نام برد. چنانچه میتواند شکل هندسی خود را در پاسخ به رفتارها و تقاضاهای مکانیکی تغییر دهد. چگالی استخوان در اثر افزایش سن و یا سوء استفاده کاهش مییابد و افزایش چگالی استخوان در نتیجه ورزش و مصرف داروهای مخصوص صورت میگیرد. تغییر هندسی شکل استخوان در مواردی نظیر بهبود شکستگی، تغییر سن، ورزش و عملهای جراحی رخ میدهد. (بیشتر…)
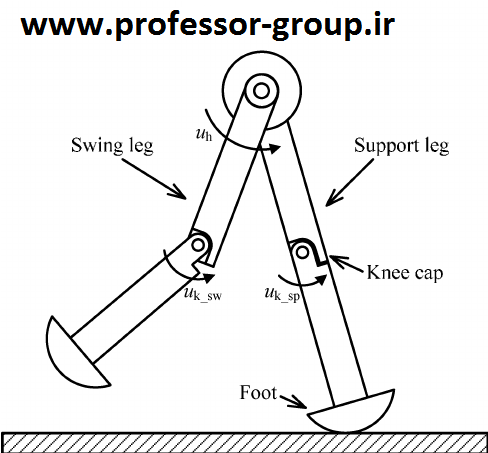
کاهش اثر اغتشاش در ربات دوپا توسط کنترل پیش بین
Disturbance Rejection Control of A Biped Walking Robot with Compliant Members Using MPC Procedure
مدل های متعارف در گام برداری ربات های دوپا به طورکلی با ساختار صلب فرض می شوند،درحالی که خواص مواد الاستیک به نظر می رسد نقش مهمی را درطبیعت ایفا می کنند. مفصل مچ پای انسان با استفاده ازفنرها ومحدودیت های مکانیکی ساخته شده است که انعطاف پذیری مفصل وانطباق دربرابرتماس با زمین را به دست می دهد. ربات دوپا با مفاصل مچ پای سازگار،تماس خوب بین کف پا و زمین برقرار می کند وباعث می شود که پا فرود نرمی داشته باشد.
از جمله مزایای این مفاصل این است که نصب سنسورنیرو برای اندازه گیری مرکز ثقل دوپا آسان ترمی شود. با این حال،مشکل کنترل سخت ترمی شود.به این دلیل که گشتاورمفصل مچ پا برای قرار دادن دوپا درمسیر گام برداری مطلوب نمی تواند ازمفصل مچ پای سازگارفراهم شود. درنتیجه مسئله کنترل این مفاصل یک چالش بسیار مهم می باشد. یک راهکار مناسب برای رفع این مشکل اصلاح گام برداری می باشد. همچنین می توان با الهام گرفتن از راه رفتن انسان و معرفی پای سازگار و استفاده از الگوریتم های کنترلی مختلف می توان در رفع این چالش استفاده نمود. (بیشتر…)