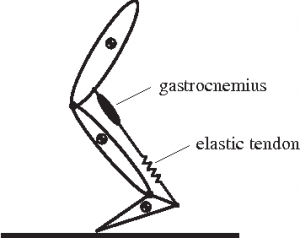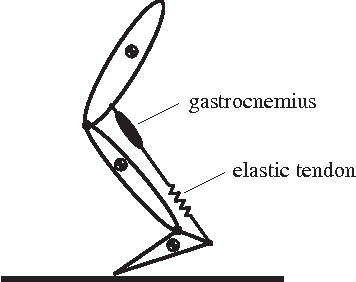
شبیه سازی دینامیکی عملکرد عضلات گاستروسولئوس در چرخه گیت کامل
تمرینات کششی در راستای کاهش اثرات پاتولوژیکی محدودیت دورسى فلکشن مچ پا بر سیستم حرکئی تجویز می گردند. پروژه حاضر با هدف بررسی تأثیر برنامه کششی فانکشنال. و اکسترافانکشنال بر پارامترهای منتخب کینماتیکی و کینتیکی مچ. پا در افراد با محدودیت دورسی فلکشن حین راه رفتن انجام شد.
ده آزمودنی به روش هدفمند و بر اساس معیارهای ورود و خروج انتخاب و به صورت تصادفی در یکی از گروه های تمرینی فانکشنال، اکسترافانکشنال جای گرفتند. پارامترهای مورد نظر به وسیله آنالیز حرکت و صفحه نیرو اندازه گیری شد. پس از طبیعی بودن توزیع داده ها. از آزمون آماری تی وابسته جهت بررسی تفاوتهای درون گروهی و از تحلیل کوواریانس .به منظور بررسی تفاوت های بین گروهی در سطح معناداری ۰۰۵ استفاده گردید.
مقایسه درون گروهی نشان داد در گروه فانکشنال میانگین دورسي فلكشن طی مرحله تحمل وزن، زمان فاز استقرار و زمان تماس پاشنه با زمین تا جداشدگی پاشنه از زمین افزایش معناداری داشت (۰/۰۵>p)و زمان پرونیشن مچ پا با کاهش همراه بود (۰/۰۵>p). نیروی ضربه ای عمودی عکس العمل زمین و زمان اوج این نیرو در گروه اکسترافانکشنال با افزایش معناداری همراه بود ( ۰/۰۵>p))، در مقایسه تفاوت های بین گروهی زمان فاز استقرار، مرحله زمانی تماس پاشنه با زمین تا جداشدگی پاشنه از زمین، مرحله زمانی پروٹیشن و دامنه دور سی فلکشن در گروه فانکشنال در مقایسه با گروه اکسترافانکشنال تفاوت معناداری مشاهده گردید(۰/۰۵>p))
نتایج
به نظر می رسد الگوی گام برداری با افزایش هیل استرایک میزان دورسي فلكشن مج. پا و فاصله زمانی تماس پاشنه با زمین تا جداشدن پاشنه از زمین را بهبود می بخشد. بنابراین، در افراد با هدف افزایش دامنه حرکتی دور سی فلکشن. و فاصله زمانی تماس پاشنه پا زمین تا جدا شدن از روی زمین، این الگوی گام برداری پیشنهاد می شود