مدلسازی فضای کاری هدایتگر ربات انسان نما با msc Adams
به تحلیل سینماتیک پیشرو، شبیه سازی و ردیابی فضای کاری هدایتگر ربات انساننما با استفاده از MSC. ADAMS پرداختند.
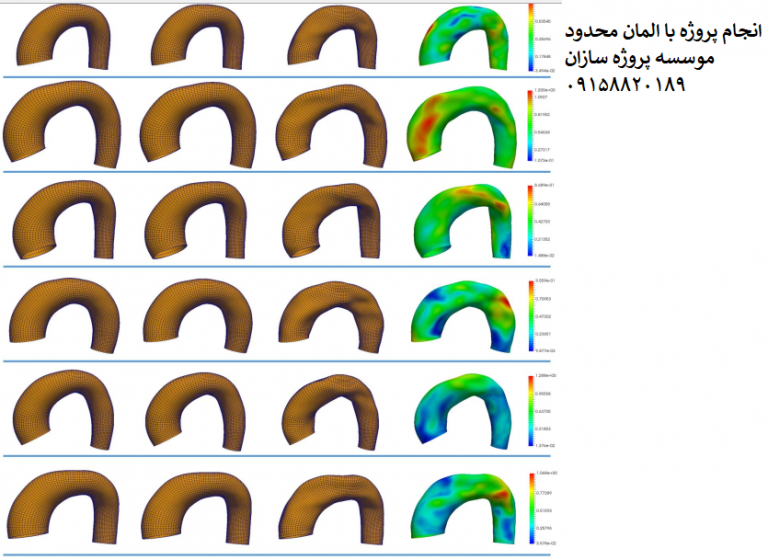
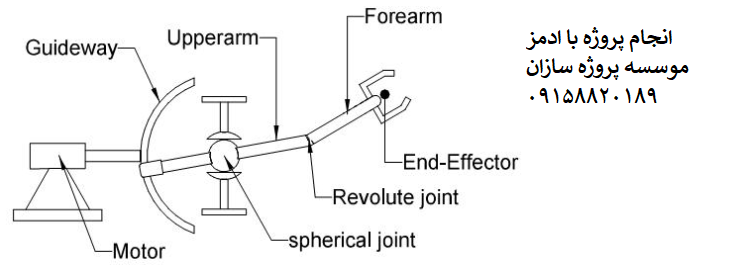
سینماتیک ربات به موقعیت اتصالاتی میپردازد.که به کمک مفاصل به هم متصل میشوند.که موقعیت و جهت هر اتصال موجود در هدایتگر رباتی را برای قرار دادن.عملگر نهایی در هدف مورد نیاز میدهد. یک مدل سینماتیکی از هدایتگر ربات انساننما با استفاده از نرمافزار دینامیک.سیستمهای چند جسمی به نام MSC توسعه داده شد. تحلیل دینامیکی خودکار سیستمهای مکانیکی (ADAMS) که بازوی انسانی را به نمایش میگذارد. مفصل شانه به عنوان مفصل کروی و مفصل آرنج.به عنوان مفصل لولا در نظر گرفته میشود.معادلات سینماتیک.و مدل نرمافزاری برای مقایسه و تأیید عملکرد هدایتگر ربات توسعه داده شده است. فضای کاری هدایتگر ربات برای نشان دادن حداکثر و حداقل ناحیه کاری هدایتگر ردیابی شد. فضای کاری هدایتگر ربات در MSC. ADAMS برای نشان.دادن ناحیه کاری هدایتگر ردیابی میشود.
برای سفارش مدلسازی فضای کاری هدایتگر ربات انسان نما با msc Adams با شماره ۰۹۱۵۸۸۲۰۱۸۹ تماس حاصل فرمائید و یا درخواست خود را به ایمیل projesazan@gmail.com ارسال فرمائید.